Code & Data
I believe that research should be reproducible. This means that all the results of a publication can be reproduced with the code and data available online. With this goal in mind, I am trying as much as I can to put the code of my publications online.

ShapeOp is a C++ library for static and dynamic geometry processing. Examples of its applications include architectural design subject to geometric constraints, and physics simulation of elastic materials. ShapeOp is released under Mozilla Public License Version 2.0.
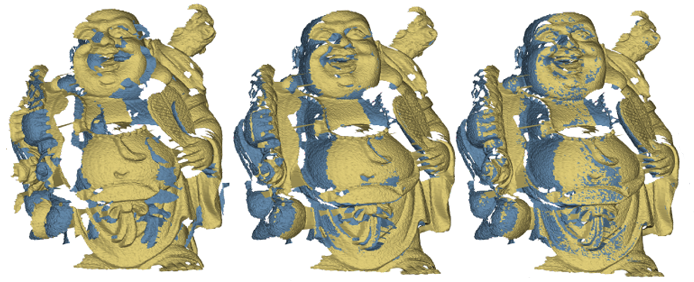
SparseICP is a C++ library for robust rigid alignment of 3D scans. SparseICP is released under Mozilla Public License Version 2.0.
Some 3d scans can be downloaded here, and some 3d statues here.

LBC is a C++ library for computing local barycentric coordinates. LBC is released under GNU General Public License.
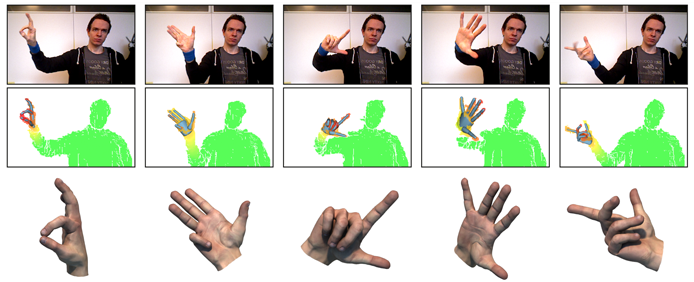
HTrack is a C++ library for hand tracking.
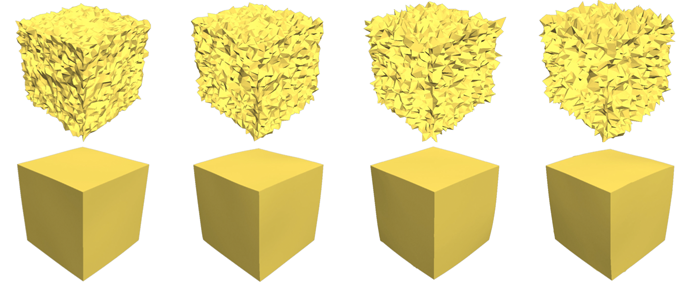
GuidedDenoising is a C++ library for denoising 3D meshes using joint bilateral filtering.
Softwares

faceshift analyzes the face motions of an actor, and describes them as a combination of basic expressions, plus head orientation and gaze. This description is then used to animate virtual characters. Feel free to try faceshift.
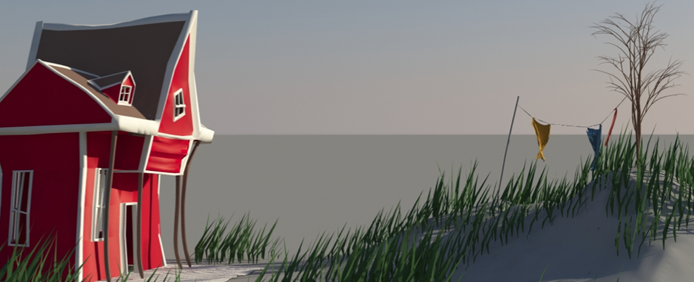
Projective Dynamics builds a bridge between nodal Finite Element methods and Position Based Dynamics, leading to a simple, efficient, robust, yet accurate solver that supports many different types of constraints. Feel free to try the demo (Mac/Win).